
Rosenmontag? Faschingsdienstag? Nein: LEGO-AG am pbg
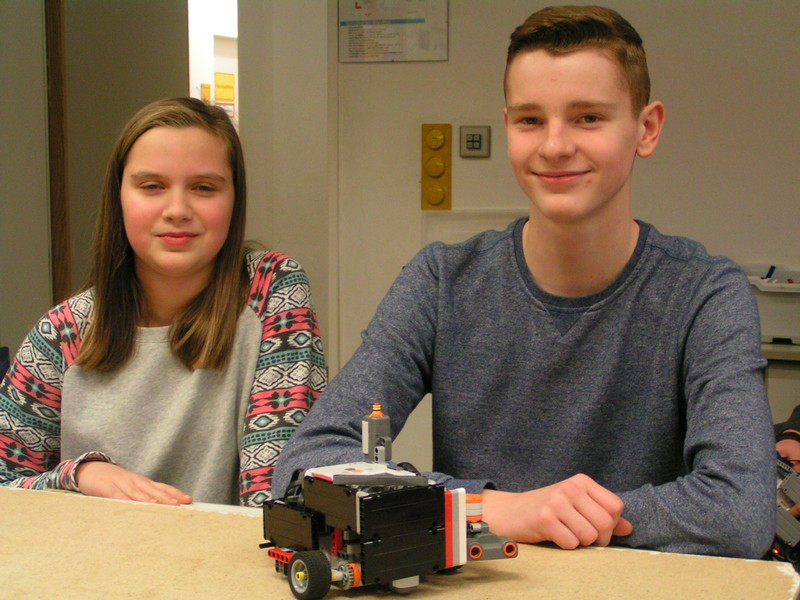
Gleich am ersten Ferientag der Winterferien hatten 16 Jungs und ein Mädchen um 8:00 Uhr schon längst ausgeschlafen und trafen sich voller Erwartung im Info-Kabinett unseres Gymnasiums. Diesjähriges Thema: Ein Lego-Sumo-Wettkampf...
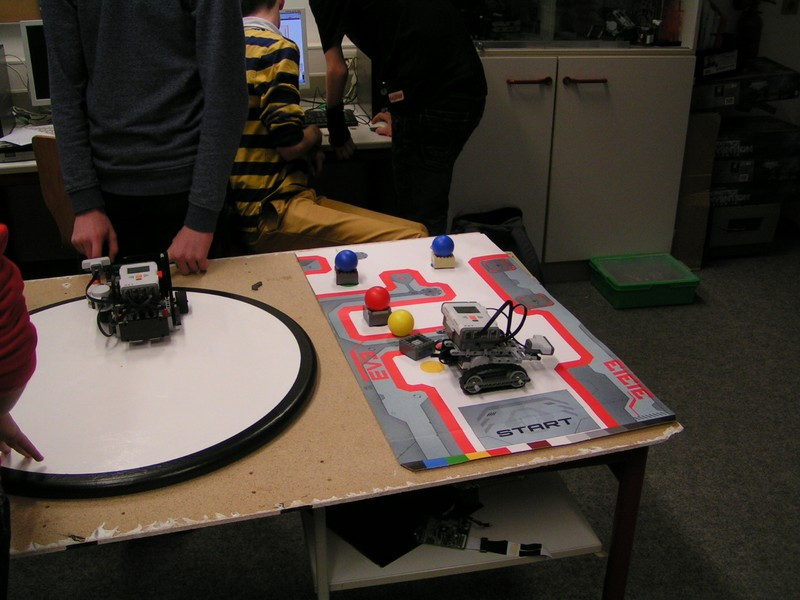
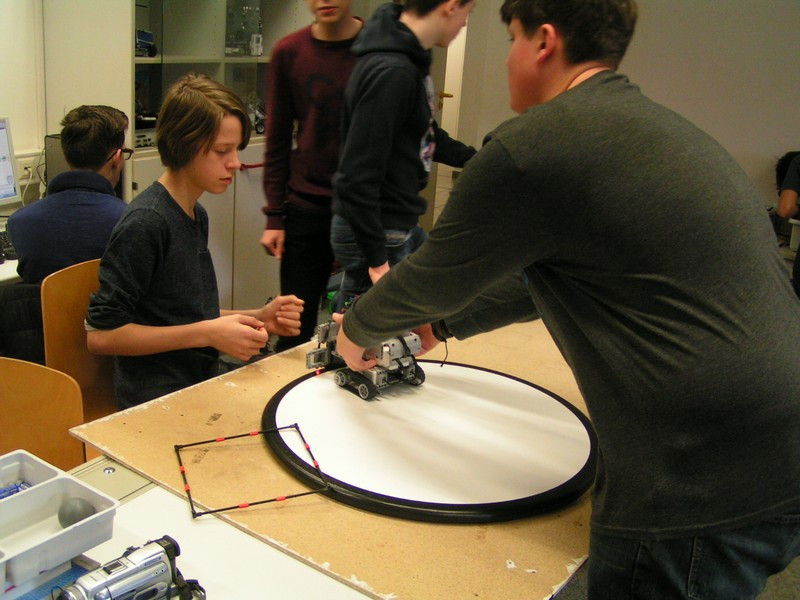
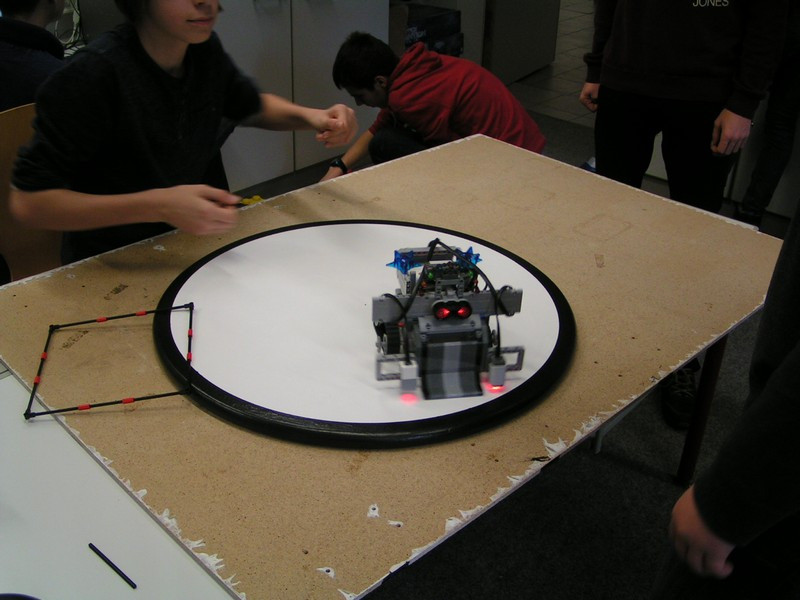
Angeregt von den zahlreich veröffentlichten Wettkämpfen von Lego-Robotern im Internet, wollten wir es dieses Jahr selbst wissen: Schaffen wir es, diverse Roboter zu konstruieren, die dann auf einer Wettkampfarena von ca. 100cm Durchmesser bestehen können? Noch einmal für alle Leser: Die Roboter waren völlig allein gestellt, ohne fremde Hilfe von außen, ohne Fernsteuerung und nur mittels ihrer Sensoren in der Wettkampfarena.
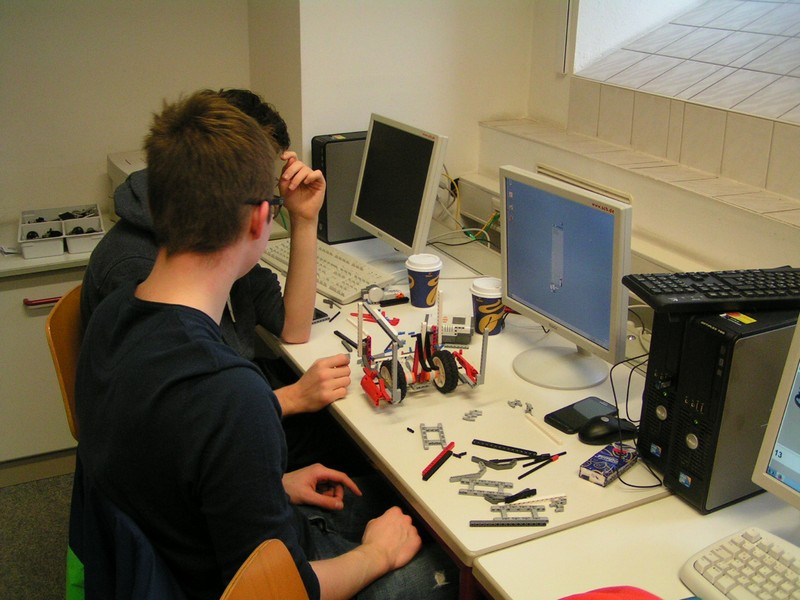
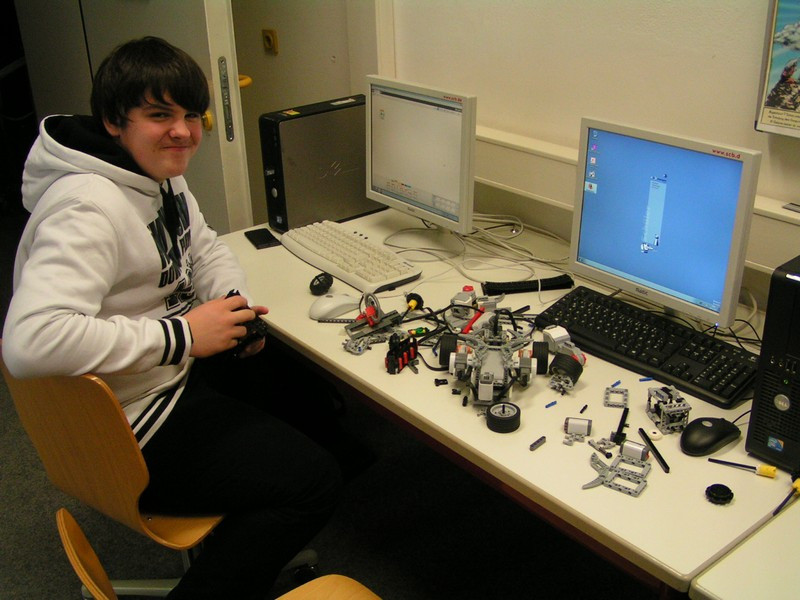
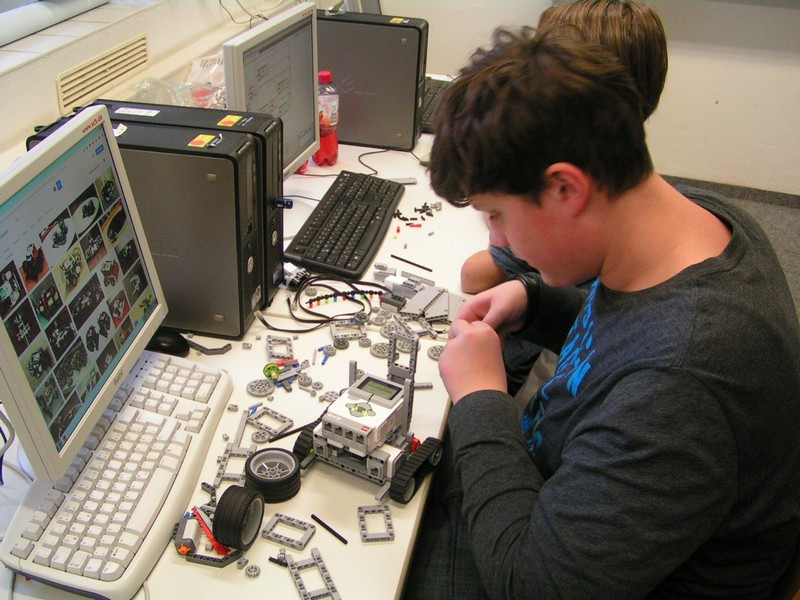
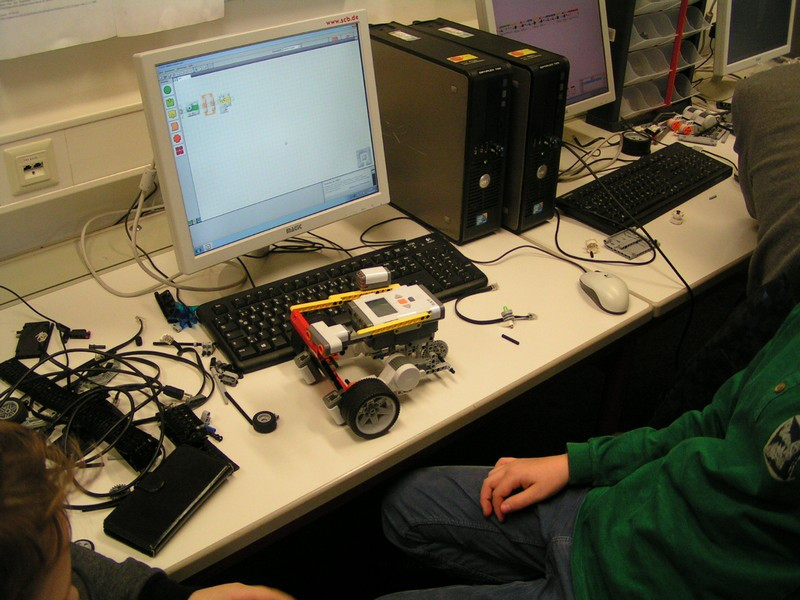
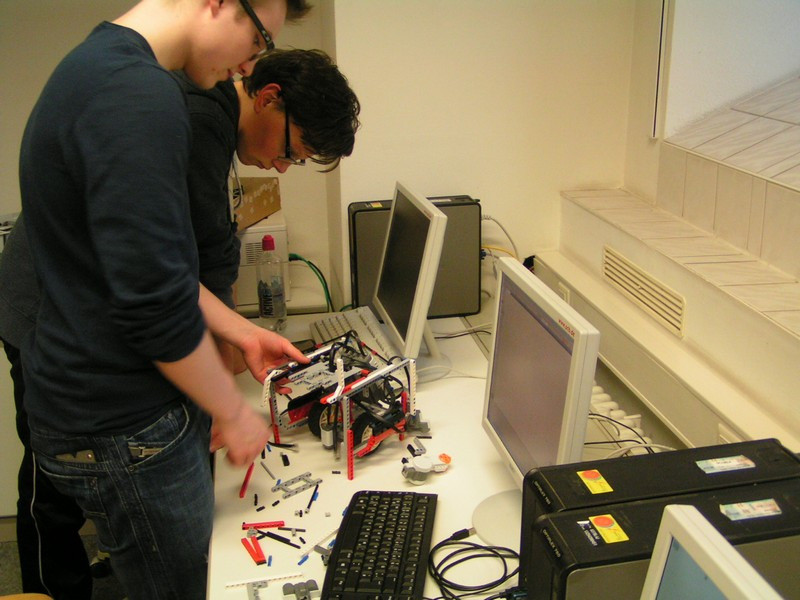
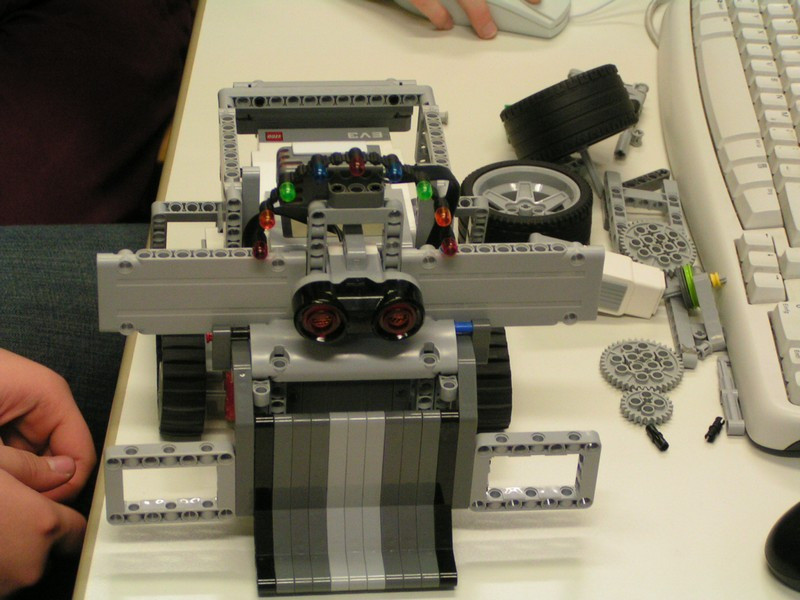
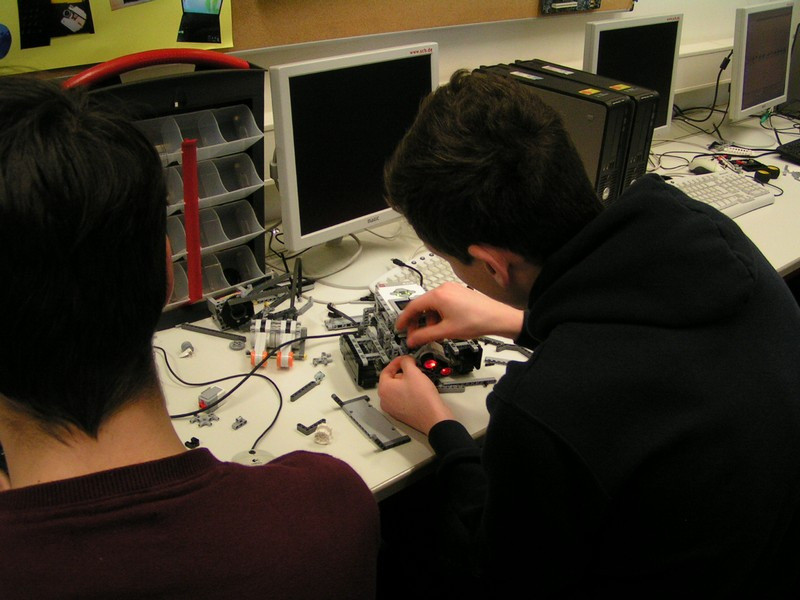
Was für eine Herausforderung. Schnell fanden sich 9 Teams zwischen 9 und 16 Jahren zusammen. Ebenso schnell waren die verfügbaren NXT- und EV3- Steine verteilt. Motoren, Sensoren, ein paar Kabel, Akkus und Lego-Bausteine häuften sich nun an den Arbeitsplätzen im Informatik-Kabinett. Und nun? Welche Eigenschaften muss denn der Roboter haben? Wo müssen Planken schützen? Wie kann er schnell und wendig sein und bleiben? Und vor allem: Wie programmiert man denn nun so einen Stein?
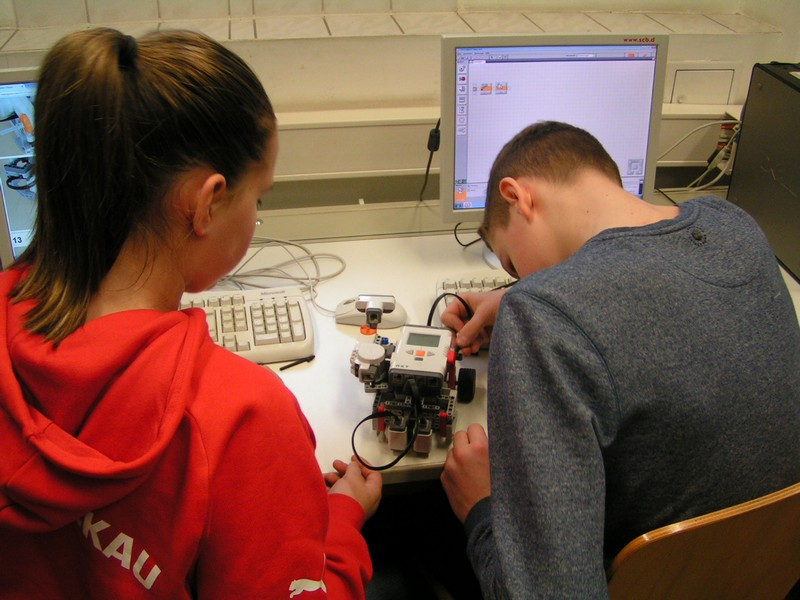
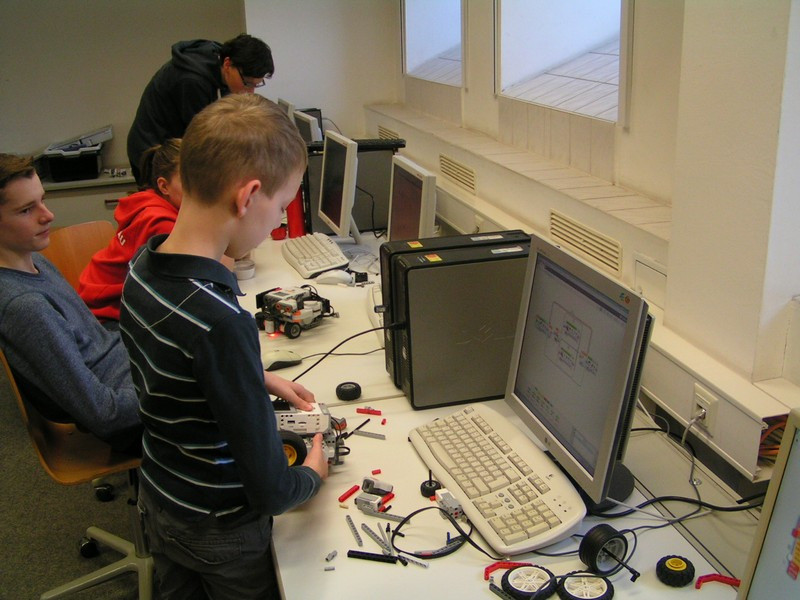
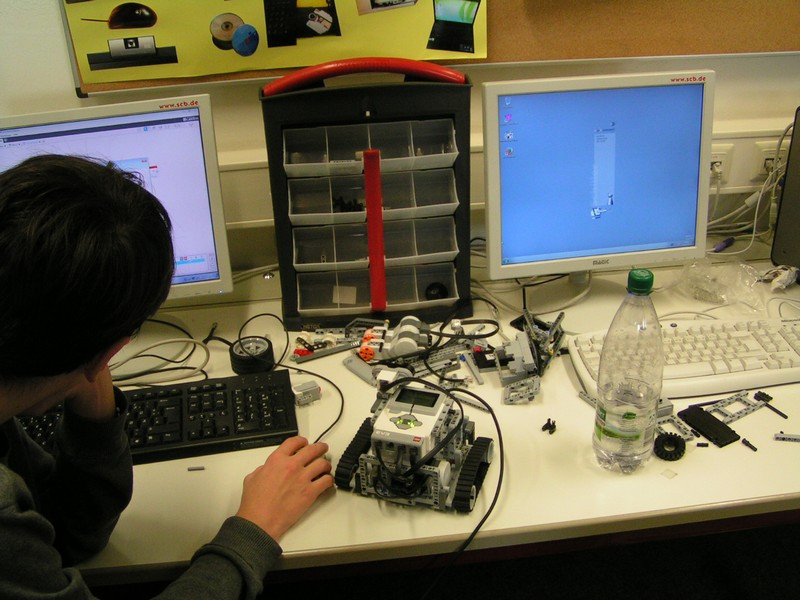
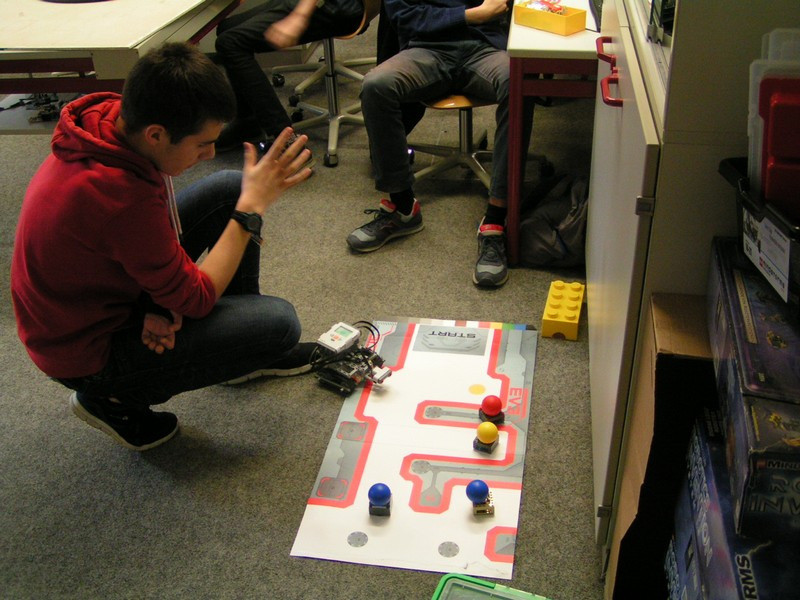
Parallel dazu konnten die Teams an einem Parcours testen, wie gut ihr "Schützling" schon ist. Immer wieder waren Sensoren gefragt. Einerseits mussten Sensoren sichern, dass der Roboter nicht die Wettkampfarena verlässt (das übernehmen klassischerweise Licht-Sensoren), andererseits mussten Sensoren ja auch den Gegner ausfindig machen und aus der Arena drängen. Dies blieb den Ultraschall-Sensoren als Aufgabe.
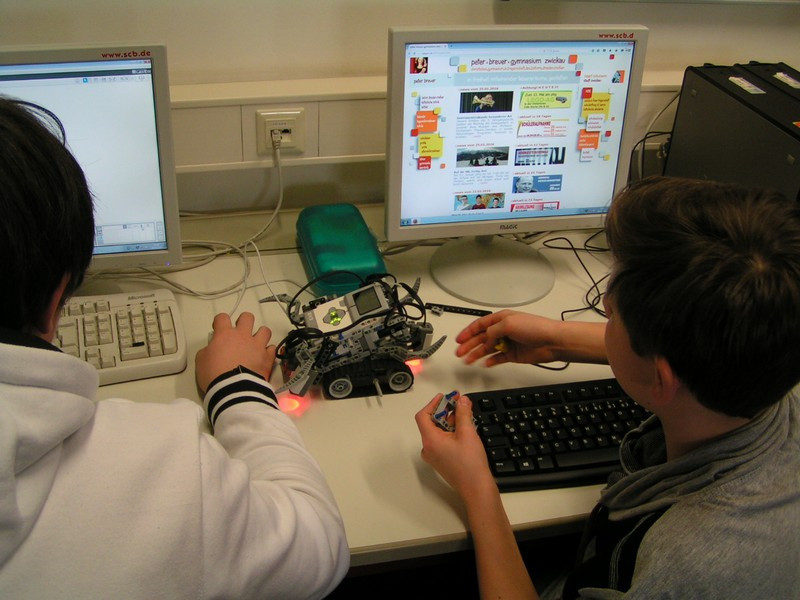
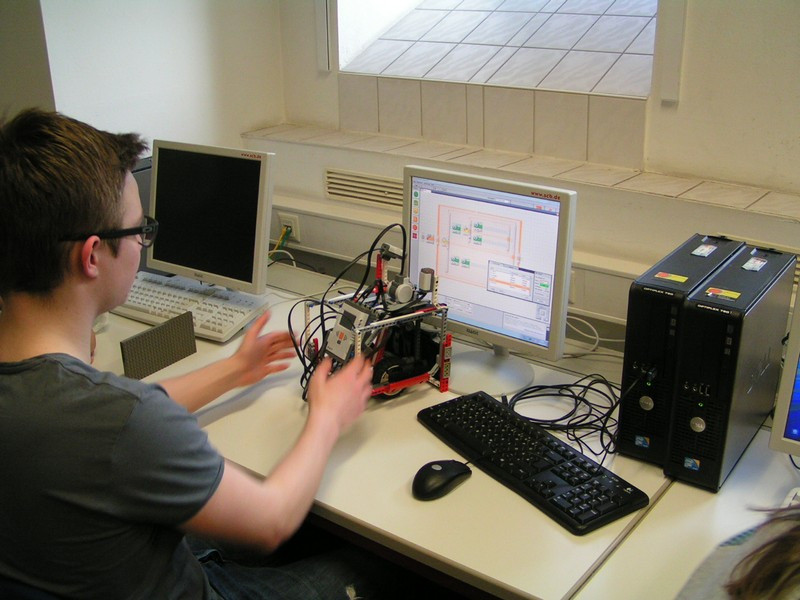
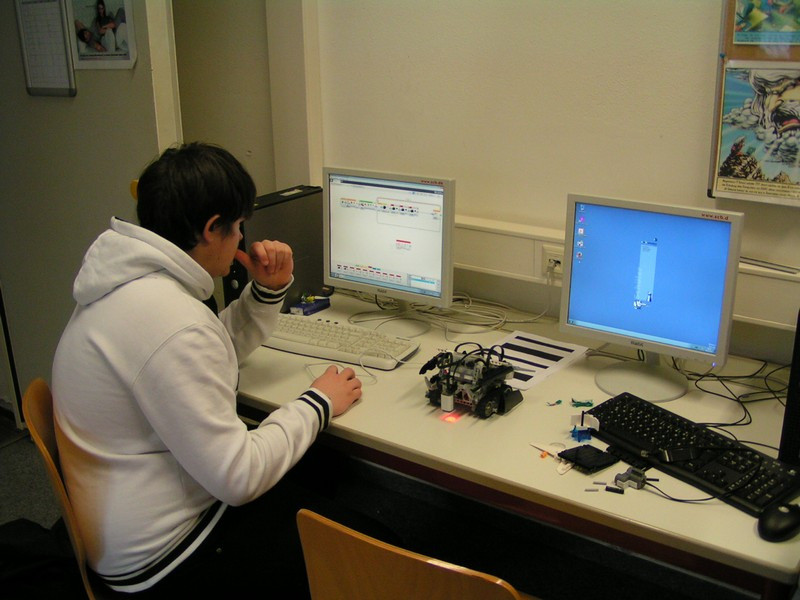
Aber Sensoren liefern nur numerische Werte. Deren Auswertung obliegt den Programmen der Schüler. Und so wurde auch schnell einmal eine Hand, die sich auf der Arena nur abstützte, von einem Roboter als Gegner angesehen, was für große Heiterkeit sorgte.
"Waaaas? Nur um zu erkennen, dass neben mir einer steht, muss ich so einen Aufwand betreiben?", fragte mich ein Schüler entsetzt. Ja, das ist nötig. Stell dir vor, du bist in einem stockdunklen Raum, der Roboter sieht nichts und erhält stattdessen nur ständig Entfernungen vom Ultraschall-Sensor. Er muss nun prüfen, ob der aktuelle Entfernungswert kleiner als sein Minimum ist. Nebenbei haben die Schüler gelernt in Schleifen zu programmieren, Variablen zu managen und Bedingungen auszuwerten. Und das mit viel Spaß und viel Lachen über die "Dummheiten" ihres Schützlings, wenn das Programm noch Schwächen hatte.
Am Nachmittag des zweiten Tages begannen dann pünktlich 13:00 Uhr die Wettkämpfe. Bei 9 Teams und den Gesetzen der Mathematik hatten wir 36 Kämpfe (jeder gegen jeden) vor uns. Ein Spiel war spannender als das andere. Jedes Team sah sich innerhalb der 36 Kämpfe einmal mit jedem anderen Team konfrontiert. Hatte der eine Team-Roboter seinen Gegner erfolgreich geschlagen, so konnte der nächste Gegner gefährlich sein.
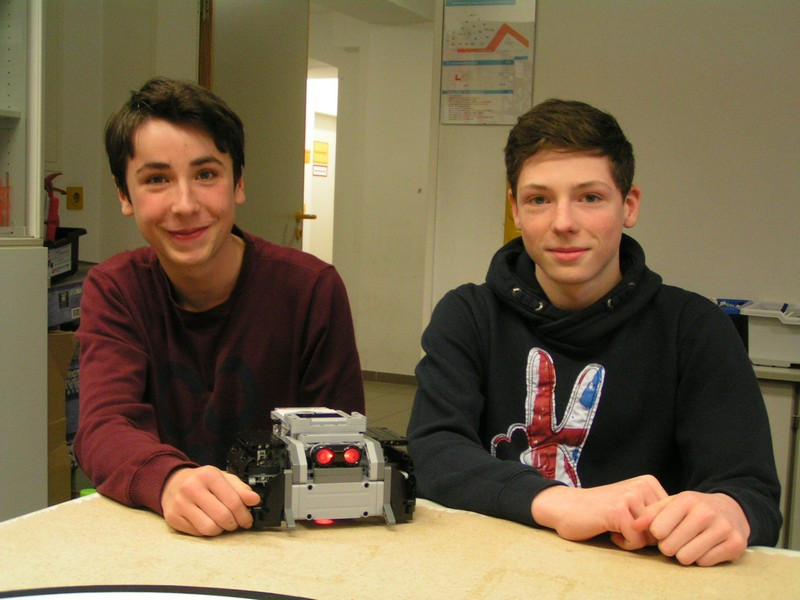
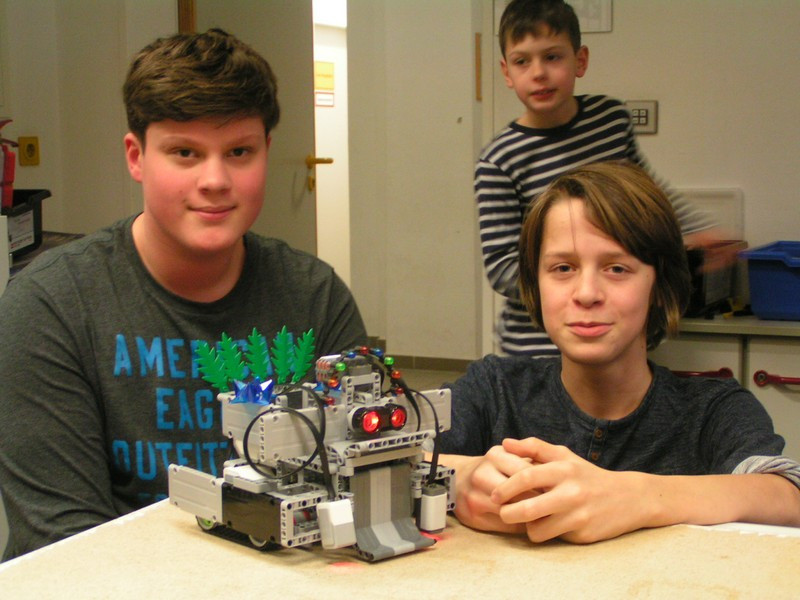
Aber alle Teams waren gut vorbereitet und so war es ganz eng. Dennoch gab es ein Siegerteam, dem dann 2 LEGO-USB-Sticks als Prämie überreicht werden konnte. Diverse Leckereien für die weiteren Plätze und ein Siegerfoto waren die letzten Aktionen des Tages.
"Sehr spannend, sehr lustig und sehr fair.", war das Resümee der Schüler.
Na ich bin jedenfalls nächstes Jahr wieder dabei. Ihr auch? Ach ja, im Herbst ist ja noch FLL.
Dr. Daßler


















































































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}